
旋轉世界的牛頓定律:力矩、角動量與轉動慣量
為什麼推門要推最外側?把牛頓力學搬上圓周的一套對照。
旋轉世界的牛頓定律
當你推一扇門時,會本能地推門把那一側,而不是靠近門軸的地方——因為前者「比較省力」。這個再熟悉不過的生活經驗,其實藏著整個轉動力學的核心:在旋轉的世界裡,重要的不只是「力多大」,還有「力作用在離轉軸多遠的地方」。
平移運動由牛頓三大定律描述;而當物體繞著一個軸旋轉時,我們需要一組「對應的」概念:力矩取代力、角動量取代動量、轉動慣量取代質量。一旦掌握這組對照,旋轉就不再神祕,它只是把同一套牛頓邏輯搬到圓周上而已。
力矩:讓東西轉起來的「旋轉力」
力矩(torque)衡量一個力造成旋轉效果的能力。它不只看力的大小,還看力臂——力的作用線到轉軸的垂直距離。
$$ \tau = r \, F \sin\theta $$
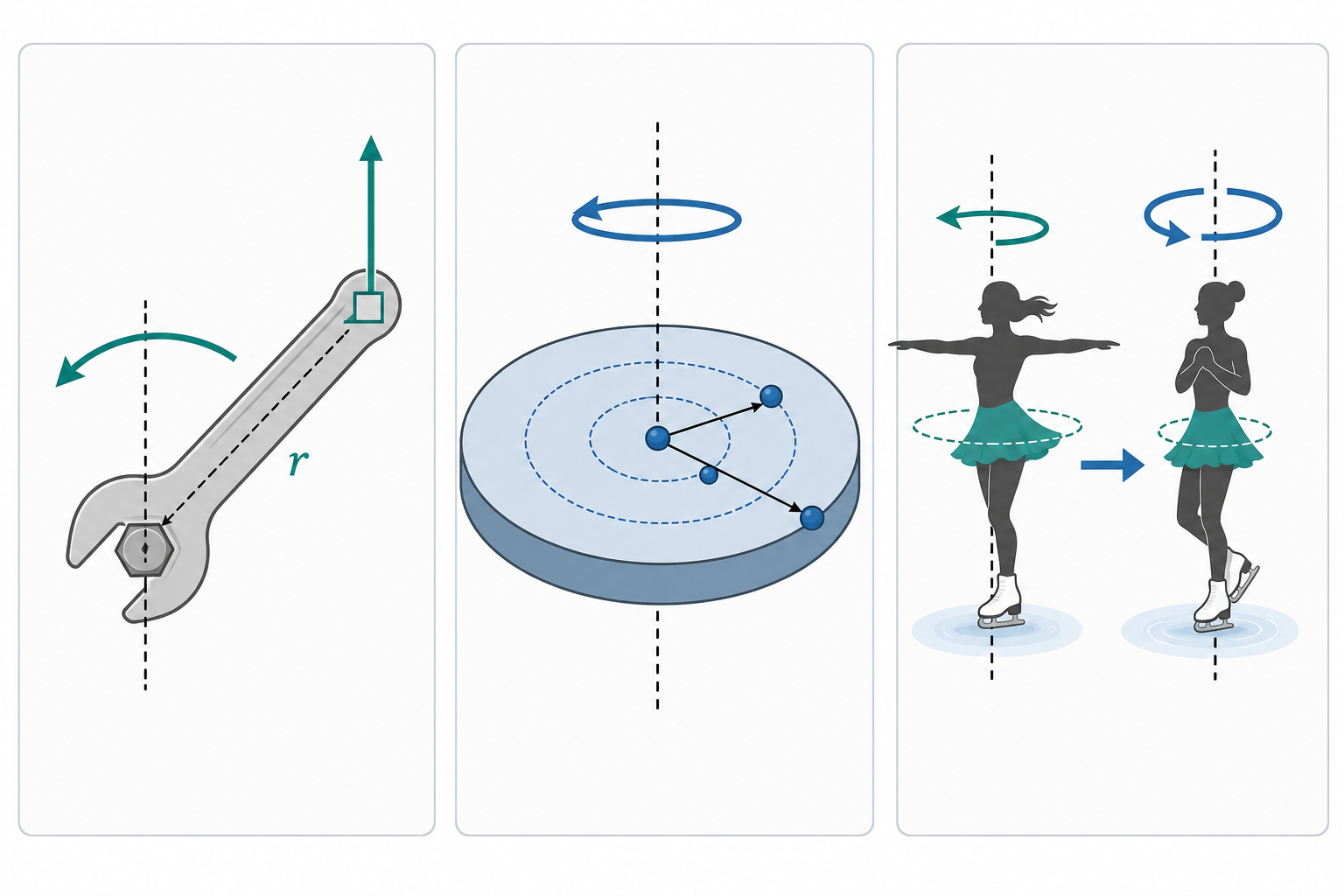
其中 $r$ 是施力點到轉軸的距離,$F$ 是力的大小,$\theta$ 是 $r$ 與 $F$ 之間的夾角。當力垂直於 $r$($\theta = 90^\circ$)時力矩最大,這正是為什麼我們推門要推最外側、而且要垂直推。
這也解釋了扳手為什麼越長越好轉:握得越遠,$r$ 越大,同樣的手勁就能產生更大的力矩去鬆開螺絲。
轉動慣量:旋轉版的「質量」
在平移裡,質量代表「物體有多難加速」。在旋轉裡,扮演同樣角色的是轉動慣量(moment of inertia) $I$。它衡量物體「有多難改變轉動狀態」,而且關鍵在於:質量離轉軸越遠,轉動慣量越大。
對一個質點,$I = mr^2$;對由許多質點組成的物體,則是把每一塊的貢獻加起來:
$$ I = \sum_i m_i r_i^2 $$
這就是花式溜冰選手收手就轉得快、張手就轉得慢的物理:把質量收近轉軸,$I$ 變小。也是為什麼同樣重的飛輪,把質量集中在外緣(像個輪圈)會比實心圓盤更「耐轉、難停」。
旋轉版的牛頓第二定律
把力矩與轉動慣量湊在一起,就得到旋轉運動的核心方程式,它和 $F = ma$ 長得幾乎一模一樣:
$$ \tau_{net} = I \alpha $$
這裡 $\alpha$ 是角加速度(角速度改變的快慢)。淨力矩越大、轉動慣量越小,物體轉動就加速得越快。
一個帶數字的小範例
假設一個半徑 $R = 0.20\ \text{m}$、質量 $M = 5.0\ \text{kg}$ 的實心圓盤(例如砂輪),我們在它的邊緣施加一個 $F = 12\ \text{N}$ 的切線力,想知道它的角加速度。
第一步:算轉動慣量。 實心圓盤繞中心軸的轉動慣量公式為 $I = \tfrac{1}{2}MR^2$:
$$ I = \tfrac{1}{2}(5.0)(0.20)^2 = \tfrac{1}{2}(5.0)(0.04) = 0.10\ \text{kg·m}^2 $$
第二步:算力矩。 力與半徑垂直,故 $\theta = 90^\circ$:
$$ \tau = R F = (0.20)(12) = 2.4\ \text{N·m} $$
第三步:用 $\tau = I\alpha$ 求角加速度。
$$ \alpha = \frac{\tau}{I} = \frac{2.4}{0.10} = 24\ \text{rad/s}^2 $$
也就是說,每過一秒,這個砂輪的轉速會增加 $24\ \text{rad/s}$(約 3.8 圈/秒)。如果我們把同樣的質量改成集中在外緣的輪圈($I = MR^2$,是圓盤的兩倍),同樣的力矩只會給出一半的角加速度——「質量擺哪裡」確實會改變結果。
角動量與它的守恆
角動量(angular momentum)是旋轉版的動量:
$$ L = I \omega $$
其中 $\omega$ 是角速度。當物體不受外力矩時,角動量守恆——這是旋轉世界最重要的守恆律之一。
溜冰選手收手加速旋轉,正是因為 $L = I\omega$ 維持不變:$I$ 變小,$\omega$ 就必須變大。地球之所以能維持穩定自轉、行星繞日的軌道之所以掃過相等面積(克卜勒第二定律),背後都是角動量守恆在運作。
高中 → 普物的銜接
| 視角 | 高中 | 大學普通物理 |
|---|---|---|
| 轉動慣量 | 套用現成公式(圓盤、桿、環) | 用積分 $I = \int r^2\,dm$ 自行推導,並用平行軸定理換軸 |
| 角動量 | $L = I\omega$,多為單軸 | $\vec{L} = I\vec{\omega}$ 的向量/張量觀點,含進動 |
| 工具 | 代數、轉動公式表 | 微積分、向量外積 $\vec{\tau} = \vec{r}\times\vec{F}$ |
先用高中的公式建立「力矩、轉動慣量、角動量」三者的直覺,再用普物的向量與微積分把它們一般化,是最順的學習路徑。
深入探討(研究所視角)
在嚴謹的剛體動力學中,轉動慣量不是一個純量,而是一個慣量張量(inertia tensor) $\mathbf{I}$——一個對稱的 $3\times3$ 矩陣,其對角元為各軸的轉動慣量、非對角元為慣量積。角動量與角速度的關係寫成 $\vec{L} = \mathbf{I}\,\vec{\omega}$,因此一般情況下 $\vec{L}$ 與 $\vec{\omega}$ 並不平行,這正是高速旋轉物體會「晃動」的根源。對任一剛體,必存在一組主軸(principal axes),使張量對角化,沿主軸旋轉時 $\vec{L}$ 才與 $\vec{\omega}$ 同向、不產生動態不平衡。
剛體在外力矩下的運動由歐拉方程式描述。在隨體主軸座標系中:
$$ I_1\dot{\omega}_1 - (I_2 - I_3)\omega_2\omega_3 = \tau_1 $$
(其餘兩式由指標輪換得到)。即使無外力矩,只要三主轉動慣量不相等,自由旋轉也會出現複雜的進動與章動。著名的中間軸定理(網球拍定理)便是其推論:繞最大或最小慣量主軸的旋轉是穩定的,而繞中間慣量主軸的旋轉則不穩定,會週期性地翻轉——這可由對歐拉方程式做線性穩定性分析嚴格證明。
更深層地,角動量守恆並非偶然,而是諾特定理的直接結果:空間的旋轉對稱性(系統在轉動下不變)必然對應一個守恆量,那就是角動量。在拉格朗日力學中,對稱軸方向的角度若是循環座標(拉格朗日量不顯含它),其共軛動量——即該方向的角動量——自動守恆。這條線索一路延伸到量子力學:角動量算符 $\hat{L}_i$ 滿足對易關係 $[\hat{L}_i, \hat{L}_j] = i\hbar\,\epsilon_{ijk}\hat{L}_k$,本徵值被量子化為 $\ell(\ell+1)\hbar^2$,並衍生出自旋與整個原子結構的角動量耦合理論。陀螺儀的進動、地球自轉軸約 26000 年的歲差、乃至慣性導航與太空船的姿態控制,全都建立在這套剛體轉動的數學之上。