
陀螺儀、角動量與進動:從慣性張量到歐拉方程
以向量角動量與剛體動力學嚴謹推導進動率、章動與相對論性延伸
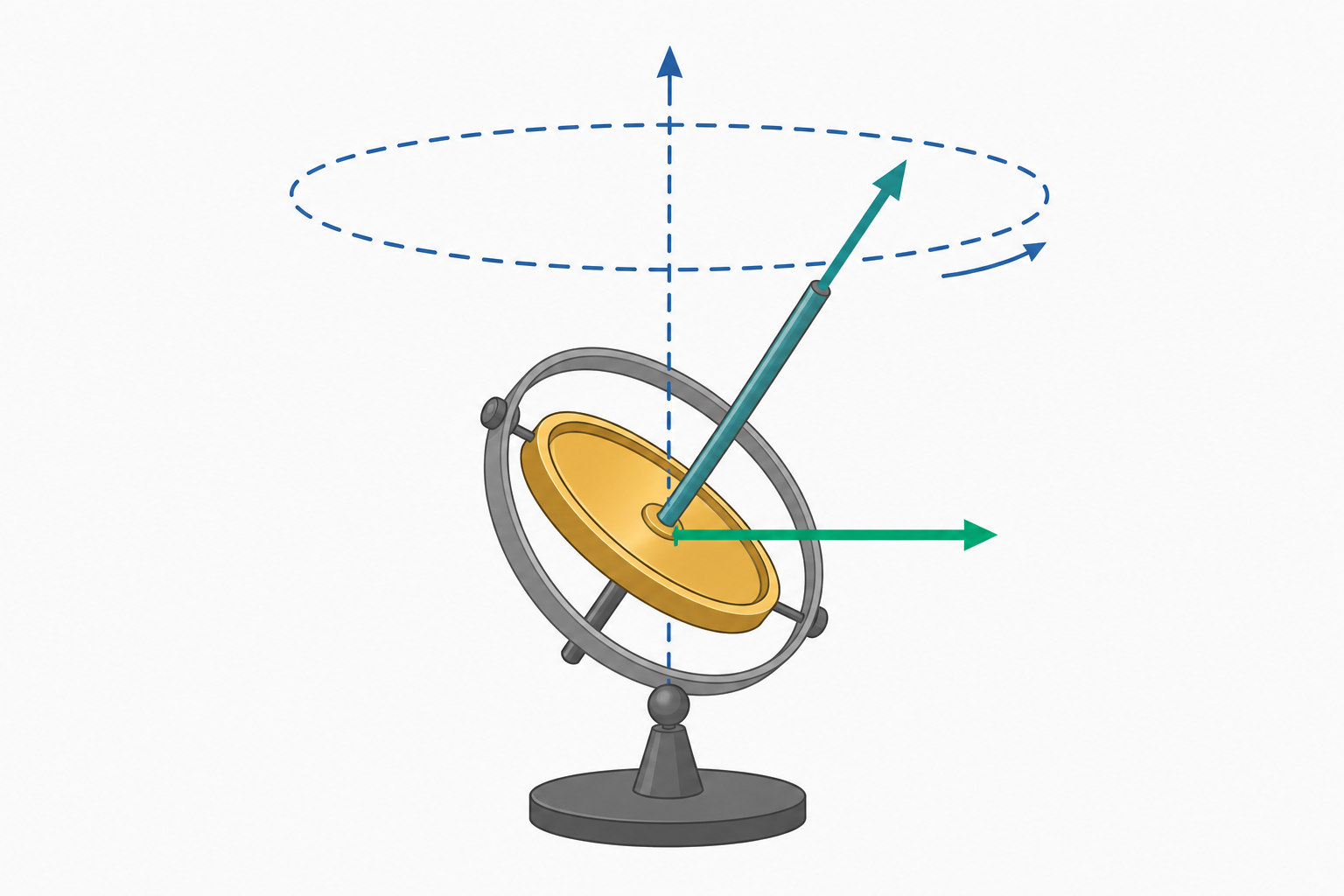
為什麼旋轉的陀螺不會倒下
把一個高速旋轉的陀螺斜放在桌上,直覺告訴我們它應該立刻倒下,但它卻沿著鉛直軸緩緩繞圈——這就是進動(precession)。要理解這個看似違反直覺的現象,關鍵不在於「力」本身,而在於角動量是向量,而力矩改變的是這個向量的方向,而非僅是它的大小。本篇從剛體角動量的張量結構出發,推導歐拉方程與進動率,並以實例量化計算。
剛體繞固定點轉動時,角動量 $\vec{L}$ 與角速度 $\vec{\omega}$ 的關係並非單純的純量比例,而是透過慣性張量 $\mathbf{I}$ 聯繫:
$$\vec{L} = \mathbf{I}\,\vec{\omega}, \qquad L_i = \sum_j I_{ij}\,\omega_j$$
其中 $I_{ij} = \int \rho(\vec{r})\,(r^2\delta_{ij} - x_i x_j)\,dV$。一般情況下 $\vec{L}$ 與 $\vec{\omega}$ 不平行,只有沿主軸(principal axes)旋轉時兩者方向才一致。這個不平行性正是陀螺動力學豐富行為的根源。
力矩、角動量與進動的核心方程
轉動的牛頓第二定律寫成
$$\vec{\tau} = \frac{d\vec{L}}{dt}$$
對於支點受重力的對稱陀螺,重力對支點的力矩為 $\vec{\tau} = \vec{r}_{cm}\times m\vec{g}$,其大小為 $\tau = mgr\sin\theta$($\theta$ 為自轉軸與鉛直線夾角),方向水平且垂直於自轉軸。
關鍵觀察:當陀螺自轉極快時,總角動量近似沿自轉軸 $\vec{L}\approx I_3\omega_s\,\hat{e}_3$,其大小 $L=I_3\omega_s$ 幾乎不變。力矩 $\vec{\tau}$ 垂直於 $\vec{L}$,因此只能改變 $\vec{L}$ 的方向。在時間 $dt$ 內,$\vec{L}$ 的尖端掃過
$$d\vec{L} = \vec{\tau}\,dt$$
這個增量水平、垂直於 $\vec{L}$ 的水平投影,使得自轉軸繞鉛直軸畫圓。設進動角速度為 $\Omega$,則自轉軸尖端的水平分量 $L\sin\theta$ 以角速度 $\Omega$ 旋轉,其線速度為
$$\left|\frac{d\vec{L}}{dt}\right| = \Omega\, L\sin\theta = \tau = mgr\sin\theta$$
$\sin\theta$ 兩邊相消,得到著名的快陀螺進動率:
$$\boxed{\;\Omega = \frac{mgr}{I_3\,\omega_s}\;}$$
注意三件事:第一,$\Omega$ 與傾角 $\theta$ 無關(在快陀螺近似下);第二,自轉越快,進動越慢($\Omega\propto 1/\omega_s$);第三,這只是一階近似,忽略了下面要談的章動。
歐拉方程與章動
要超越「快陀螺近似」,需回到隨體座標(body frame)下的歐拉方程。由於 $\mathbf{I}$ 在實驗室座標下隨時間變化,改用主軸座標較方便。利用 $\left(\frac{d\vec L}{dt}\right)_{\text{lab}} = \left(\frac{d\vec L}{dt}\right)_{\text{body}} + \vec\omega\times\vec L$,對主軸 $(I_1,I_2,I_3)$ 展開得:
$$I_1\dot\omega_1 - (I_2-I_3)\omega_2\omega_3 = \tau_1$$ $$I_2\dot\omega_2 - (I_3-I_1)\omega_3\omega_1 = \tau_2$$ $$I_3\dot\omega_3 - (I_1-I_2)\omega_1\omega_2 = \tau_3$$
對對稱陀螺($I_1=I_2\neq I_3$)在無外力矩下,第三式給出 $\dot\omega_3=0$,即自轉率守恆;前兩式組成簡諧方程,解出自由進動(free precession)角頻率 $\omega_p = \frac{I_3-I_1}{I_1}\omega_3$。這正是地球自轉軸的錢德勒擺動(Chandler wobble)的理論基礎。
當重力力矩存在時,完整運動由三個歐拉角 $(\phi,\theta,\psi)$ 描述——分別對應進動、章動、自轉。實際陀螺的傾角 $\theta$ 並非固定,而是上下擺動,這就是章動(nutation)。完整解中,$\theta$ 在 $\theta_{\min}$ 與 $\theta_{\max}$ 之間振盪,自轉軸尖端畫出擺線(cycloid)軌跡。只有在初始條件恰好或經阻尼後,才退化為純粹的穩定進動。
定量小範例
考慮一個自行車輪式陀螺:質量 $m=2.0\ \text{kg}$,視為半徑 $a=0.30\ \text{m}$ 的薄圓環,故 $I_3 = ma^2 = 2.0\times0.30^2 = 0.18\ \text{kg·m}^2$。輪子以 $f=12\ \text{轉/秒}$ 自轉,重心到支點距離 $r=0.15\ \text{m}$,$g=9.8\ \text{m/s}^2$。
步驟一:自轉角速度
$$\omega_s = 2\pi f = 2\pi\times 12 \approx 75.4\ \text{rad/s}$$
步驟二:自旋角動量
$$L = I_3\omega_s = 0.18\times 75.4 \approx 13.6\ \text{kg·m}^2/\text{s}$$
步驟三:重力力矩(取水平 $\theta=90^\circ$,$\sin\theta=1$)
$$\tau = mgr = 2.0\times 9.8\times 0.15 = 2.94\ \text{N·m}$$
步驟四:進動率
$$\Omega = \frac{\tau}{L} = \frac{2.94}{13.6} \approx 0.216\ \text{rad/s}$$
換算成週期 $T_{\text{prec}} = 2\pi/\Omega \approx 29\ \text{s}$。也就是說,這個陀螺繞鉛直軸轉一圈約需 29 秒,而它自己每秒已轉 12 圈——進動確實遠慢於自轉,符合 $\Omega\ll\omega_s$ 的快陀螺前提(這裡 $\Omega/\omega_s\approx 0.003$,近似極佳)。
深入探討(研究所視角)
從拉格朗日力學看,對稱重陀螺是經典的可積系統。以歐拉角為廣義座標,拉格朗日量為
$$L = \tfrac{1}{2}I_1(\dot\theta^2 + \dot\phi^2\sin^2\theta) + \tfrac{1}{2}I_3(\dot\psi + \dot\phi\cos\theta)^2 - mgr\cos\theta$$
由於 $\phi$ 與 $\psi$ 皆為循環座標(cyclic coordinates),對應兩個守恆動量 $p_\phi$ 與 $p_\psi$,加上能量守恆,三個運動常數使系統完全可積。消去 $\dot\phi,\dot\psi$ 後,章動方程可化約為單變數 $u=\cos\theta$ 的形式 $\dot u^2 = f(u)$,其中 $f(u)$ 是三次多項式。$\theta$ 在 $f(u)=0$ 的兩根之間振盪,章動的上下界與擺線型軌跡由此三次方程的根結構決定。轉到哈密頓表述,$(p_\phi, p_\psi)$ 為作用量變數,系統在環面上做準週期運動,正是 Arnold–Liouville 定理所描述的可積結構,可進一步用作用-角度變數(action-angle variables)量子化。
近代發展上,陀螺進動的概念延伸至多個尺度。在廣義相對論中,自轉物體在彎曲時空中沿測地線運動會經歷測地進動(geodetic precession)與參考系拖曳(frame-dragging, Lense–Thirring 效應),Gravity Probe B 衛星實驗以超導陀螺儀直接量測到這兩種相對論性進動,驗證了愛因斯坦場方程的預言。在原子與核物理中,磁矩 $\vec\mu$ 在磁場中的拉莫進動(Larmor precession) $\vec\Omega_L = -\gamma\vec B$ 與古典陀螺進動數學同構,是核磁共振(NMR)與磁振造影(MRI)的物理基礎;而電子自旋在電磁場中的托馬斯進動(Thomas precession)則是相對論運動學的純粹效應,解釋了原子光譜精細結構中自旋-軌道耦合的因子 $1/2$。
理論連結上,進動現象的核心——「守恆量為向量、外力矩旋轉之」——在工程上催生了慣性導航系統:藉由陀螺儀維持的不變空間方向作為參考軸,配合加速度計即可在無外部訊號下推算姿態與位置。現代 MEMS 陀螺儀與光纖陀螺儀(基於 Sagnac 效應)已將這套古典剛體力學推向晶片尺度。從歐拉的剛體方程,到 Kovalevskaya 陀螺這類稀有的第三個可積案例,再到相對論進動與量子自旋,角動量與進動串起了古典力學、場論與量子理論的一條主線。