
剛體轉動動力學與轉動慣量張量
從角動量定義到歐拉方程式,理解主軸、慣性張量與中間軸不穩定性
為什麼旋轉中的剛體會「歪掉」?
把一支不對稱的扳手或一本書拋向空中,你會發現它有時轉得平穩,有時卻翻來覆去地亂滾。同樣是無外力矩的自由轉動,為什麼結果如此不同?答案藏在一個比「轉動慣量是純量」更深的事實裡:剛體的轉動慣量其實是一個張量。當我們把角速度 $\boldsymbol{\omega}$ 和角動量 $\mathbf{L}$ 之間的關係寫清楚,普物階段「$L = I\omega$」的純量直覺就會被一個 $3\times 3$ 矩陣取代,而剛體運動的所有奇異現象——進動、章動、翻轉定理——都從這個張量的結構自然湧現。
從角動量定義導出轉動慣量張量
考慮一個剛體繞固定點(或質心)以角速度 $\boldsymbol{\omega}$ 轉動。其中質量元 $dm$ 位於 $\mathbf{r}$ 處,速度為 $\mathbf{v} = \boldsymbol{\omega}\times\mathbf{r}$。總角動量為
$$\mathbf{L} = \int \mathbf{r}\times\mathbf{v}\, dm = \int \mathbf{r}\times(\boldsymbol{\omega}\times\mathbf{r})\, dm.$$
利用向量三重積展開 $\mathbf{r}\times(\boldsymbol{\omega}\times\mathbf{r}) = r^2\boldsymbol{\omega} - (\mathbf{r}\cdot\boldsymbol{\omega})\mathbf{r}$,得
$$\mathbf{L} = \int \left[r^2\boldsymbol{\omega} - (\mathbf{r}\cdot\boldsymbol{\omega})\mathbf{r}\right] dm.$$
寫成分量形式(採 Einstein 求和約定),第 $i$ 個分量為
$$L_i = \int \left(r^2\delta_{ij} - r_i r_j\right)\omega_j\, dm = I_{ij}\,\omega_j,$$
其中
$$I_{ij} = \int \left(r^2\delta_{ij} - r_i r_j\right) dm$$
正是轉動慣量張量。它是一個對稱張量($I_{ij}=I_{ji}$),對角元 $I_{xx}=\int(y^2+z^2)\,dm$ 等為熟悉的轉動慣量,非對角元 $I_{xy}=-\int xy\,dm$ 等稱為慣性積。關鍵結論是:$\mathbf{L} = \mathbf{I}\,\boldsymbol{\omega}$,而 $\mathbf{L}$ 與 $\boldsymbol{\omega}$ 一般並不平行。只有當 $\boldsymbol{\omega}$ 沿著某特殊方向時兩者才共線。
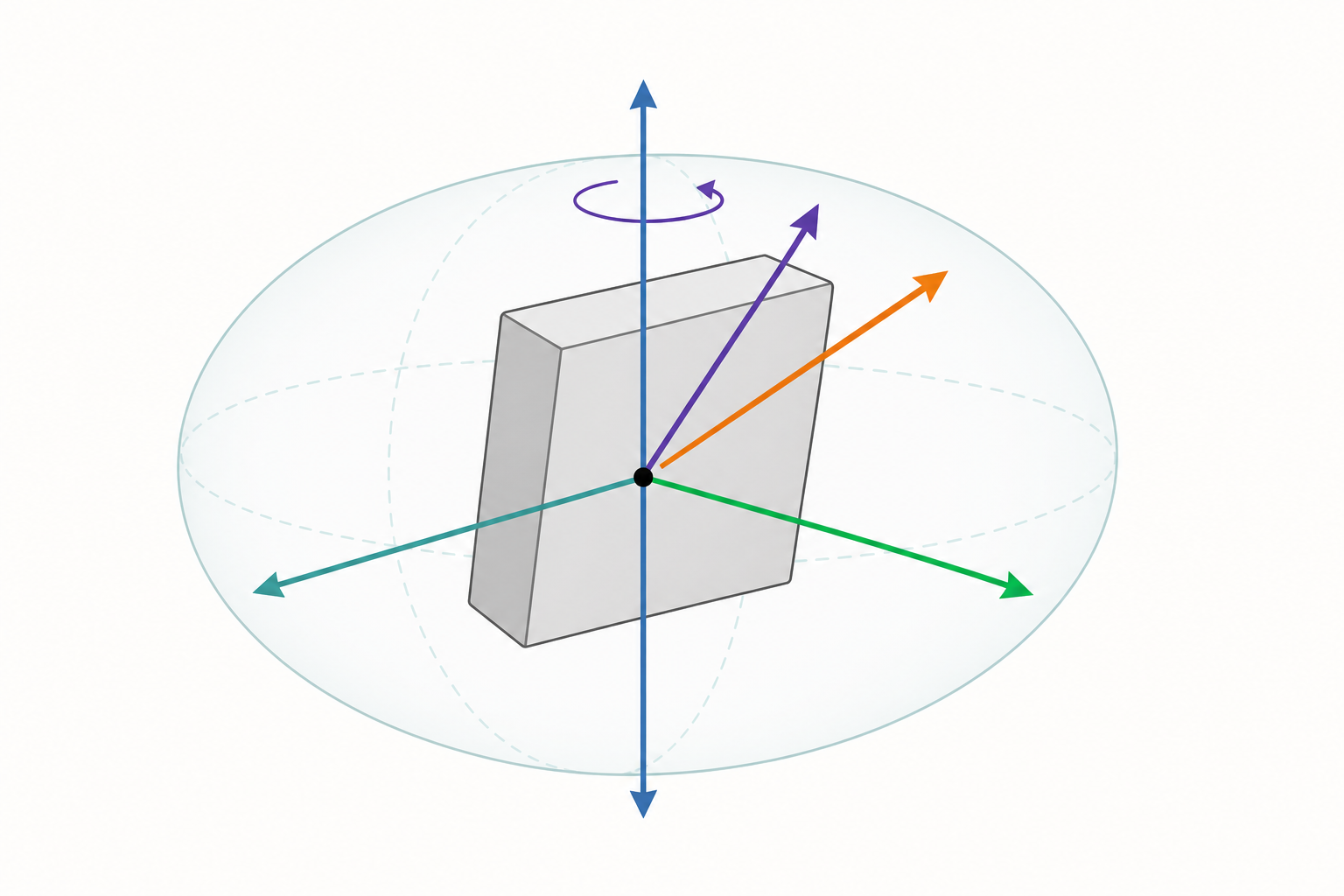
主軸與本徵值問題
既然 $\mathbf{I}$ 是實對稱矩陣,由譜定理可知它必有三個實本徵值與一組正交的本徵向量。求解本徵值方程
$$\mathbf{I}\,\hat{\mathbf{e}}_k = I_k\,\hat{\mathbf{e}}_k$$
得到的三個方向 $\hat{\mathbf{e}}_1,\hat{\mathbf{e}}_2,\hat{\mathbf{e}}_3$ 稱為主軸,對應的本徵值 $I_1, I_2, I_3$ 稱為主轉動慣量。在主軸座標系中,張量對角化為
$$\mathbf{I} = \begin{pmatrix} I_1 & 0 & 0 \\ 0 & I_2 & 0 \\ 0 & 0 & I_3 \end{pmatrix}.$$
此時 $L_k = I_k\omega_k$,慣性積全部消失。當剛體恰好繞某一主軸轉動時,$\mathbf{L}\parallel\boldsymbol{\omega}$,轉動才不需外力矩來維持——這正是平衡轉子的物理意義。轉動動能也化為簡潔形式
$$T = \tfrac{1}{2}\boldsymbol{\omega}\cdot\mathbf{I}\,\boldsymbol{\omega} = \tfrac{1}{2}\left(I_1\omega_1^2 + I_2\omega_2^2 + I_3\omega_3^2\right).$$
歐拉方程式:在轉動座標系中描述動力學
剛體轉動的牛頓對應式是 $\dfrac{d\mathbf{L}}{dt}\Big|_{\text{慣性系}} = \boldsymbol{\tau}$。但在慣性系裡 $\mathbf{I}$ 隨時間變化(因為剛體在轉),計算極不便。改用固連於剛體的主軸座標系,利用轉動座標系的微分變換
$$\left.\frac{d\mathbf{L}}{dt}\right|_{\text{慣性}} = \left.\frac{d\mathbf{L}}{dt}\right|_{\text{剛體}} + \boldsymbol{\omega}\times\mathbf{L},$$
代入 $L_k = I_k\omega_k$,得到著名的歐拉方程式:
$$ \begin{aligned} I_1\dot{\omega}_1 - (I_2 - I_3)\omega_2\omega_3 &= \tau_1, \\ I_2\dot{\omega}_2 - (I_3 - I_1)\omega_3\omega_1 &= \tau_2, \\ I_3\dot{\omega}_3 - (I_1 - I_2)\omega_1\omega_2 &= \tau_3. \end{aligned} $$
這組非線性耦合微分方程式是剛體動力學的核心。在無外力矩($\boldsymbol{\tau}=0$)下,對中間主軸的微擾分析會給出指數增長的不穩定性——這就是著名的中間軸定理(網球拍定理 / Dzhanibekov 效應),解釋了為何書本繞中軸拋出時必然翻轉。
定量小範例:均勻長方體繞中間軸的不穩定性判據
考慮一塊均勻長方體,邊長 $a=0.30\,\text{m}$、$b=0.20\,\text{m}$、$c=0.04\,\text{m}$,質量 $M=1.5\,\text{kg}$。均勻長方體繞質心三主軸的轉動慣量為
$$I_x = \tfrac{1}{12}M(b^2+c^2),\quad I_y = \tfrac{1}{12}M(a^2+c^2),\quad I_z = \tfrac{1}{12}M(a^2+b^2).$$
逐步計算:
$$I_x = \tfrac{1.5}{12}(0.20^2+0.04^2) = 0.125\times(0.0416) = 5.20\times10^{-3}\,\text{kg·m}^2,$$ $$I_y = \tfrac{1.5}{12}(0.30^2+0.04^2) = 0.125\times(0.0916) = 1.145\times10^{-2}\,\text{kg·m}^2,$$ $$I_z = \tfrac{1.5}{12}(0.30^2+0.20^2) = 0.125\times(0.1300) = 1.625\times10^{-2}\,\text{kg·m}^2.$$
故 $I_x < I_y < I_z$,中間軸是 $y$ 軸。對歐拉方程式($\boldsymbol{\tau}=0$)在繞 $y$ 軸主轉動 $\omega_y=\Omega$ 上加微擾 $\omega_x,\omega_z\ll\Omega$,線性化後可得增長率
$$\sigma^2 = \frac{(I_y-I_x)(I_z-I_y)}{I_x I_z}\,\Omega^2.$$
代入數值,$(I_y-I_x)=6.25\times10^{-3}$、$(I_z-I_y)=4.80\times10^{-3}$、$I_xI_z=8.45\times10^{-5}$:
$$\sigma = \Omega\sqrt{\frac{6.25\times10^{-3}\times 4.80\times10^{-3}}{8.45\times10^{-5}}} = \Omega\sqrt{0.355} \approx 0.596\,\Omega.$$
$\sigma^2>0$ 確認繞中間軸不穩定,微擾以時間常數 $\tau\approx 1/(0.596\,\Omega)$ 指數放大;若 $\Omega = 10\,\text{rad/s}$,則 $\tau\approx 0.17\,\text{s}$——大約六分之一秒,剛體就會明顯翻轉,與日常拋書經驗一致。而繞 $I_x$ 或 $I_z$(最大、最小主軸)時對應量為負,給出純虛數 $\sigma$,代表穩定的小振盪。
深入探討(研究所視角)
在分析力學框架下,剛體動力學最優雅的表述來自拉格朗日與哈密頓力學。以三個歐拉角 $(\phi,\theta,\psi)$ 作為廣義座標,角速度在剛體主軸上的投影為 $\omega_1 = \dot\phi\sin\theta\sin\psi + \dot\theta\cos\psi$ 等,將其代入 $T=\tfrac12\sum I_k\omega_k^2$ 得到拉格朗日量 $L=T-V$。對稱陀螺($I_1=I_2\neq I_3$)的情形特別重要:因 $\phi$ 與 $\psi$ 為循環座標,對應的共軛動量 $p_\phi$、$p_\psi$ 守恆,連同能量守恆使系統可積,章動角 $\theta$ 的運動化約為一維有效位勢問題 $\tfrac12 I_1\dot\theta^2 + V_{\text{eff}}(\theta)=E$,進動與章動的耦合行為由此精確求解。這正是 Lagrange 陀螺的經典結果,其哈密頓形式更揭示了相空間環面結構。
在更抽象的層次上,剛體位形空間是旋轉群 $SO(3)$,其動力學最自然地寫在李群與李代數上。轉動慣量張量定義了 $\mathfrak{so}(3)$ 上的一個度規,無力矩歐拉方程式正是 $SO(3)$ 上測地流的 Euler–Poincaré 方程式,與 Arnold 對理想流體的幾何詮釋($SO(3)$ 換成體積保持微分同胚群 $\text{SDiff}$)共享同一數學骨架。無力矩剛體的相空間軌跡可由能量橢球面與角動量球面的交線——Poinsot 構造——幾何地完全刻畫:$\mathbf{L}$ 在剛體系中沿著這些 polhode 曲線運動,中間軸附近的分隔線(separatrix)正對應前述的不穩定翻轉。
近代發展上,這套理論在多個尺度持續延伸。在太空動力學中,自由翻滾的小行星與失控衛星的姿態由歐拉方程式加上內部能量耗散項描述,能量最小化迫使物體最終繞最大主軸自旋(major-axis spin),這也是 Dzhanibekov 效應在軌道實驗中被反覆觀測的原因。在分子物理中,非線性剛體轉子模型對應對稱與不對稱陀螺分子的轉動光譜,其量子化版本以角動量算符 $\hat{L}^2$ 與主軸投影 $\hat{L}_3$ 建構哈密頓量,本徵值問題給出微波光譜的轉動譜線。而幾何力學的現代語言(動量映射、約化理論、非完整約束下的滾動剛體)則把這個十九世紀的古典問題,連結到當代控制理論、機器人姿態規劃與凝態系統中的 Berry 相位幾何,使「轉動慣量張量」這個看似基礎的物件,至今仍是連接古典與前沿的活躍節點。