
當每一個觀測都帶著誤差,我們憑什麼說座標「準」?
從誤差傳播律、最小二乘平差與誤差橢圓,到 GNSS 載波相位與變形監測的假設檢定,理解測量學如何量化並管理不確定性。
當每一個觀測都帶著誤差,我們憑什麼說座標「準」?
讀完入門篇,你已經知道測量的三個基本量——水平角、距離、高程差——以及導線如何用閉合差檢核品質。但那裡留下一個沒有真正回答的問題:當我們說某個控制點的座標是 $(250\,163.136,\ 2\,760\,076.072)$,憑什麼相信小數點後第三位?那個「.136」到底是真的,還是只是計算機湊出來的數字?
入門篇用「精度比 $1:30000$」帶過這件事,但工程實務遠比這嚴格。一座斜張橋的纜索錨碇、一條高鐵的軌道中心線、一棟超高層的核心筒,放樣容許誤差常以公釐計。此時我們需要的不只是「誤差很小」這種定性描述,而是一套能回答「這個座標有多可靠、誤差會往哪個方向偏、有多大機率落在某個範圍內」的量化理論。
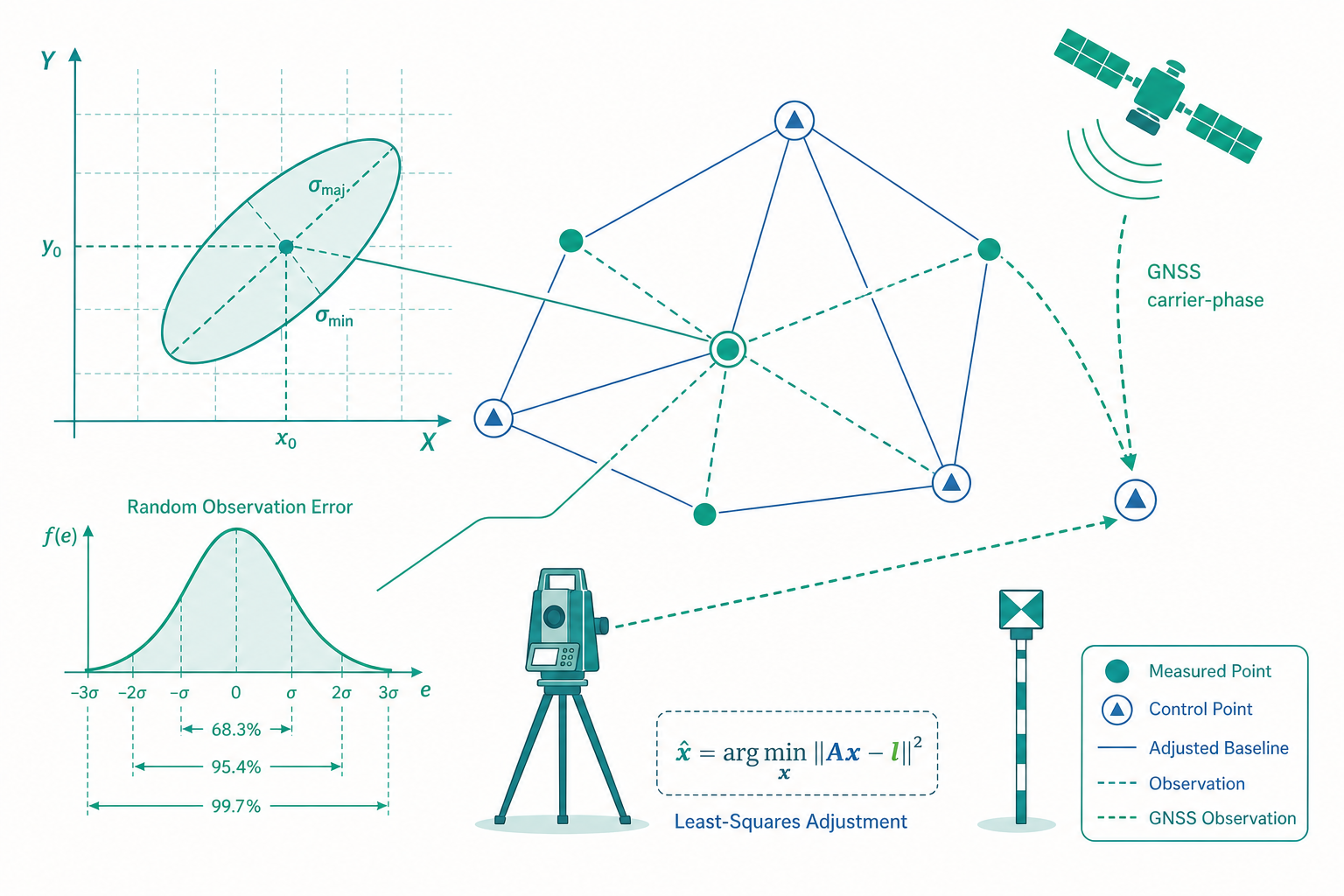
這篇進階文章,我們就從誤差傳播(error propagation) 的數學機制出發,走進最小二乘平差(least squares adjustment) 的完整框架,理解誤差橢圓(error ellipse) 如何把不確定性畫成一個看得見的形狀,最後落到台灣最迫切的應用——結構與地表的變形監測,看測量學如何用統計檢定判斷「那 3 公釐的位移,到底是真的在動,還是只是雜訊」。
誤差不是錯誤:隨機誤差與其分布
進階測量的第一個觀念轉換,是把誤差(error) 與錯誤(mistake/blunder) 徹底分開。讀錯尺、記錯數字、照準錯目標,那是「錯誤」,必須靠檢核流程剔除。而我們真正要管理的是隨機誤差(random error)——即使儀器完美、操作無誤,重複量同一段距離十次,讀數仍會在某個中心值附近上下跳動。這種跳動來自無數微小、互相獨立的擾動(大氣折射、儀器微振、讀數判斷),依中央極限定理(central limit theorem),它們的總和趨近常態分布(normal distribution)。
我們用標準差(standard deviation)$\sigma$ 描述單一觀測的離散程度。對常態分布而言,真值落在 $\pm 1\sigma$ 內的機率約 68.3%、$\pm 2\sigma$ 約 95.4%、$\pm 3\sigma$ 約 99.7%。測量規範裡的「容許誤差」幾乎都建立在這個機率語言上——所謂 $2\sigma$ 限差,意思是「正常情況下只有不到 5% 的觀測會超出,超出就值得懷疑是不是混進了錯誤」。
關鍵在於:座標不是直接量出來的,而是用觀測量(角、距)算出來的。那麼,觀測的隨機誤差會怎麼「流」進最終座標?這就是誤差傳播要回答的問題。
誤差傳播律:誤差如何在公式中流動
假設一個量 $y$ 是若干獨立觀測量 $x_1, x_2, \dots, x_n$ 的函數 $y = f(x_1, \dots, x_n)$,各觀測的標準差為 $\sigma_{x_i}$。當誤差夠小,可用一階泰勒展開把 $f$ 線性化,於是 $y$ 的標準差由誤差傳播律(law of error propagation) 給出:
$$\sigma_y^2 = \left(\frac{\partial f}{\partial x_1}\right)^2 \sigma_{x_1}^2 + \left(\frac{\partial f}{\partial x_2}\right)^2 \sigma_{x_2}^2 + \cdots + \left(\frac{\partial f}{\partial x_n}\right)^2 \sigma_{x_n}^2$$
每一項都是「偏導數的平方」乘上「該觀測的變異數」。偏導數 $\partial f / \partial x_i$ 扮演放大係數(sensitivity) 的角色:它告訴我們 $x_i$ 的微小擾動會被放大幾倍灌進 $y$。
讓我們把它用在最常見的情境。設某點相對於測站的座標增量為
$$\Delta X = D \sin\alpha, \qquad \Delta Y = D \cos\alpha$$
其中距離 $D$ 的標準差為 $\sigma_D$、方位角 $\alpha$ 的標準差為 $\sigma_\alpha$(以弧度計)。對 $\Delta X$ 套用誤差傳播律:
$$\sigma_{\Delta X}^2 = (\sin\alpha)^2\,\sigma_D^2 + (D\cos\alpha)^2\,\sigma_\alpha^2$$
這條式子有兩個讀法。第一項是測距誤差的貢獻,與距離本身無關;第二項是測角誤差的貢獻,前面乘了 $D^2$——距離越遠,角度誤差被放大得越兇。這正是入門篇「隧道導線越長越危險」的嚴格數學根據。當 $D$ 達到數公里,即使是 $1''$ 的測角精度,橫向誤差也會膨脹到公分級。
看一個例子:一段邊長的座標誤差
某全站儀測得 $D = 1\,200.000$ m、方位角 $\alpha = 30°00'00''$。儀器規格為測距 $\sigma_D = \pm(2\,\text{mm} + 2\,\text{ppm})$、測角 $\sigma_\alpha = \pm 3''$。試估算 $\Delta X$ 的標準差。
步驟一:整理各項標準差為一致單位。
測距標準差:$\sigma_D = 2\,\text{mm} + 2 \times 10^{-6} \times 1\,200\,000\,\text{mm} = 2 + 2.4 = 4.4\,\text{mm} = 0.0044\,\text{m}$。
測角標準差換成弧度:$\sigma_\alpha = 3'' \times \dfrac{\pi}{180 \times 3600} \approx 1.454 \times 10^{-5}\,\text{rad}$。
步驟二:代入誤差傳播律。
$$\sigma_{\Delta X}^2 = (\sin 30°)^2 (0.0044)^2 + (1200 \cos 30°)^2 (1.454\times 10^{-5})^2$$
測距項:$(0.5)^2 \times (0.0044)^2 = 4.84 \times 10^{-6}\,\text{m}^2$。
測角項:$(1200 \times 0.8660)^2 \times (1.454\times 10^{-5})^2 = (1039.2)^2 \times 2.114\times 10^{-10} \approx 2.28 \times 10^{-4}\,\text{m}^2$。
步驟三:合成。
$$\sigma_{\Delta X} = \sqrt{4.84\times 10^{-6} + 2.28\times 10^{-4}} \approx \sqrt{2.33\times 10^{-4}} \approx 0.0153\,\text{m} \approx 15\,\text{mm}$$
注意:測角項($2.28\times 10^{-4}$)比測距項($4.84\times 10^{-6}$)大了將近 50 倍。在 1.2 公里這種尺度,測角才是誤差主因,買更貴的測距精度幾乎沒用。這個診斷能力——找出誤差的主要來源、把資源花在刀口上——正是進階測量相對於入門背公式的價值所在。
過約束與最小二乘:讓多餘的觀測變成可靠度
入門篇說導線繞一圈會有閉合差,並用羅盤規則把它「分配」掉。但羅盤規則只是一個經驗法則。真正嚴謹的處理是最小二乘平差。
核心情境是過約束(over-determined):我們的觀測數目比決定未知數所需的最少數量還多。例如一個點本來只要兩個觀測就能定位,我們卻量了五個方向、三段距離。這些觀測彼此會「打架」——沒有任何一組座標能同時讓所有觀測方程式都精確成立。最小二乘的哲學是:既然無法讓所有觀測都滿足,那就找一組座標,讓所有觀測「殘差的加權平方和」最小。
把問題寫成矩陣形式。設未知數修正量為向量 $\mathbf{x}$,觀測量與其近似值之差為 $\mathbf{l}$,殘差為 $\mathbf{v}$,係數矩陣(各觀測方程式對未知數的偏導數)為 $\mathbf{A}$,則觀測方程式為:
$$\mathbf{v} = \mathbf{A}\mathbf{x} - \mathbf{l}$$
我們要最小化的目標函數是 $\mathbf{v}^T \mathbf{P} \mathbf{v}$,其中 $\mathbf{P}$ 是權矩陣(weight matrix)——精度高的觀測權重大、精度差的權重小。權重通常取變異數的倒數 $p_i = \sigma_0^2 / \sigma_i^2$。對目標函數求極小,得到法方程式(normal equations) 的解:
$$\hat{\mathbf{x}} = (\mathbf{A}^T \mathbf{P} \mathbf{A})^{-1} \mathbf{A}^T \mathbf{P} \mathbf{l}$$
這條式子是整個近代測量平差的心臟。但比座標本身更有價值的是它的副產品。平差後,單位權中誤差(reference variance) 估計為:
$$\hat{\sigma}_0^2 = \frac{\mathbf{v}^T \mathbf{P} \mathbf{v}}{r}$$
其中 $r$ 是多餘觀測數(degrees of freedom)= 觀測數 − 必要未知數。$\hat{\sigma}_0$ 是品質的總體指標:若它遠大於理論值,代表觀測精度被高估、或仍藏有未剔除的錯誤。更重要的是,未知數的變異數–協方差矩陣(variance-covariance matrix) 為:
$$\boldsymbol{\Sigma}_{\hat{x}} = \hat{\sigma}_0^2\,(\mathbf{A}^T \mathbf{P} \mathbf{A})^{-1}$$
這個矩陣的對角線是各座標分量的變異數,非對角線則描述座標分量之間的相關性。它讓我們不只得到座標,還得到「這組座標有多可信」的完整統計刻畫——這是羅盤規則永遠給不出來的。
誤差橢圓:把不確定性畫成一個形狀
變異數–協方差矩陣藏著一個美麗的幾何意義。對平面上的一個點,其 $(X, Y)$ 兩分量的協方差子矩陣為
$$\boldsymbol{\Sigma} = \begin{bmatrix} \sigma_X^2 & \sigma_{XY} \\ \sigma_{XY} & \sigma_Y^2 \end{bmatrix}$$
若 $\sigma_{XY} \neq 0$,代表 $X$ 與 $Y$ 的誤差彼此相關——誤差不是一個正圓,而是一個傾斜的橢圓。對這個矩陣做特徵分解,兩個特徵值的平方根 $\sqrt{\lambda_1}$、$\sqrt{\lambda_2}$ 就是橢圓的半長軸與半短軸,特徵向量決定橢圓的傾角。這就是誤差橢圓(error ellipse):
- 橢圓的大小代表定位的整體不確定度。
- 橢圓的形狀(長寬比) 揭露幾何強度。又扁又長的橢圓代表某個方向特別弱——這常見於導線一路直線延伸、橫向缺乏交會約束的情況(典型如隧道導線:沿軸向精度好、橫向卻很弱)。
- 橢圓的方向告訴你誤差最容易往哪一邊偏。
誤差橢圓把抽象的協方差矩陣變成一張看得見的圖,讓工程師在佈設控制網之前就能評估:哪幾個點該加測、要不要增加交會方向、基準站該擺在哪裡,才能把橢圓「壓圓壓小」。這種事前的網形設計(network design) 與可靠度分析(reliability analysis),是高精度工程測量(如核電廠、粒子加速器、長大橋梁)不可或缺的一環。
GNSS 的精度從哪來:載波相位與整數待定值
入門篇提到 GNSS/RTK 能即時提供公分級座標,但沒說「為什麼能到公分」。這裡值得深入,因為它牽涉一個漂亮的觀念。
衛星定位最直覺的做法是測「電碼虛擬距離(code pseudorange)」——量測碼信號的飛行時間。但碼的解析度有限,單點定位只能到數公尺。真正的高精度來自載波相位(carrier phase) 觀測:GPS L1 載波波長僅約 19 公分,若能量到相位的百分之一,理論解析度就達公釐級。
問題在於,我們能量到的只是相位的「小數部分」,卻不知道衛星到接收機之間「整整包含了幾個完整波長」——這個未知整數稱為整數待定值(integer ambiguity)$N$。載波相位觀測方程式可寫成:
$$\Phi = \rho + c(\delta t_r - \delta t^s) + \lambda N + \text{(電離層、對流層、多路徑等誤差)}$$
其中 $\rho$ 是幾何距離、$\lambda$ 是波長。整個 GNSS 高精度定位的核心難題,就是整數待定值解算(ambiguity resolution):先用最小二乘把 $N$ 當實數估出來(浮點解),再用 LAMBDA 之類的演算法在整數格點上搜尋最可能的整數組合,固定成「固定解(fixed solution)」。一旦 $N$ 被正確固定,載波相位就變成一把超精密的尺,公分級定位於焉達成。
RTK(即時動態定位) 之所以能即時固定待定值,靠的是差分(differencing):流動站與一個座標已知的基準站同時觀測同一批衛星,把兩台接收機的觀測「相減」。許多誤差(衛星鐘差、軌道誤差、大部分大氣延遲)在短基線上高度相關,相減後幾乎抵銷。台灣綿密的 e-GNSS 基準站網正是把這個原理規模化——使用者不必自己架基準站,連上網路即可獲得改正參數。但這也帶來限制:基線越長、大氣狀況差異越大,誤差抵銷得越不乾淨,這是為何長基線 RTK 精度會退化。
值得強調的是,GNSS 與地面測量並非取代關係,而是互補。GNSS 在開闊處又快又準,卻在隧道內、都會峽谷、衛星遮蔽處失效;全站儀與水準儀則不受天空遮蔽影響,但需要點點相連、誤差會累積。高精度工程網常把兩者一起塞進同一個最小二乘平差,用 GNSS 提供絕對框架、用地面觀測加密與檢核——這又回到了前面的協方差與誤差橢圓理論。
把測量變成偵測器:變形監測與假設檢定
台灣位於板塊交界,地面本身就在動:地震同震位移、慢滑移、地下水超抽造成的地層下陷、邊坡潛移、橋梁與大壩的長期變形。測量在此扮演的角色,已從「一次性定位」升級為「持續追蹤會動的目標」——這就是變形監測(deformation monitoring)。
監測的本質是比較兩個歷元(epoch) 的座標:$\Delta = \hat{x}_{t_2} - \hat{x}_{t_1}$。但這裡有個致命陷阱:$\Delta$ 永遠不會是零,因為每次測量都帶著隨機誤差。所以真正的問題不是「點有沒有移動」,而是「這個 $\Delta$ 到底是真實位移,還是只是兩次測量的雜訊?」這是一個統計假設檢定(hypothesis testing) 問題。
我們設虛無假設 $H_0$:「點沒有移動($\Delta = 0$)」。位移量 $\Delta$ 本身有其協方差 $\boldsymbol{\Sigma}_\Delta = \boldsymbol{\Sigma}_{t_1} + \boldsymbol{\Sigma}_{t_2}$(兩歷元誤差獨立則相加)。建構檢定統計量:
$$T = \boldsymbol{\Delta}^T \boldsymbol{\Sigma}_\Delta^{-1} \boldsymbol{\Delta}$$
這個量服從卡方(或 $F$)分布。若 $T$ 超過某顯著水準(如 95%)對應的臨界值,我們才有統計信心拒絕 $H_0$、宣告「點確實動了」。換句話說,唯有當位移量大到「無法用測量誤差解釋」時,才算偵測到真實變形。
這套思維直接決定監測系統的設計底線:監測精度必須遠優於要偵測的變形量。若一座大壩要在位移達 5 mm 時就示警,量測誤差就得壓到 1~2 mm 以內,否則訊號永遠淹沒在雜訊裡。現代手段於是層層堆疊——自動化全站儀(automated total station) 對固定稜鏡作週期觀測、GNSS 連續站(CORS) 提供毫米級時間序列、衛星雷達干涉(InSAR / PSInSAR) 對整片區域作非接觸的地表沉陷掃描。台灣的高鐵沿線、彰化雲林的地層下陷區、各大水庫與順向坡,都布有這類監測網,背後跑的正是上述的協方差傳播與假設檢定。
重點回顧
- 進階測量把隨機誤差當作可量化的對象:它服從常態分布,用標準差 $\sigma$ 描述,$2\sigma$、$3\sigma$ 對應規範裡的容許限差。
- 誤差傳播律 $\sigma_y^2 = \sum (\partial f/\partial x_i)^2 \sigma_{x_i}^2$ 揭示誤差如何流進座標;偏導數是放大係數,長距離下測角誤差因乘上 $D^2$ 而成為主因。
- 最小二乘平差處理過約束系統,解 $\hat{\mathbf{x}} = (\mathbf{A}^T \mathbf{P} \mathbf{A})^{-1} \mathbf{A}^T \mathbf{P} \mathbf{l}$,並輸出變異數–協方差矩陣量化座標可靠度。
- 誤差橢圓把協方差矩陣畫成可見的形狀,其大小、長寬比與方向揭示定位強度,是網形設計的依據。
- GNSS 公分級精度來自載波相位與整數待定值解算;RTK 靠差分抵銷共同誤差。變形監測則用假設檢定判斷位移是真實訊號還是雜訊。
深入探討(研究所視角)
把上述各環節統整起來,會發現現代測量學的研究前沿正圍繞一個主題:從「估計靜態座標」走向「估計時變的、隨機的地球」。傳統最小二乘假設未知數是固定常數,但板塊持續運動使這個假設失效——於是 TWD97 必須引入歷元(epoch) 概念(如 TWD97[2010]),把座標標注在特定時刻,並以速度場描述其變化,形成動態(kinematic)參考框架。研究上,這牽涉到把卡爾曼濾波(Kalman filter) 引進測量平差:把座標與其變化率一起放進狀態向量,在時間軸上遞迴更新,讓監測系統能即時融合 GNSS、全站儀與 InSAR 的多源觀測。
另一條前沿是可靠度與穩健估計(reliability and robust estimation)。最小二乘對「粗差(outlier)」極度敏感——一個未被剔除的錯誤觀測會污染整個網的解。資料探測(data snooping) 透過標準化殘差的統計檢定逐一篩查可疑觀測,而 $L_1$ 範數估計、M-估計等穩健方法則設法降低粗差的影響。在無人值守的自動化監測場景(觀測量以每天數萬筆計、人工檢核不可行),這套自動品質控制理論的重要性與日俱增。
最後,台灣特殊的地球物理環境讓測量與大地動力學(geodynamics) 深度交會。密集的 GNSS 連續站網不只服務工程,更成為觀測地震週期形變、慢地震、火山地殼變動的科學儀器;InSAR 時序分析則把毫米級的地表沉陷化為整片影像。當測量精度逼近地球自身運動的尺度,「量測誤差」與「真實地球訊號」的界線變得模糊——如何在統計上嚴謹地把兩者分離,正是當代大地測量學最迷人也最具挑戰的問題。