
一座橋的兩端,怎麼確定會在中間接起來?
從全站儀測角測距、導線平差到 TWD97 大地座標,看測量學如何把真實世界的位置精準鎖進統一的參考框架。
一座橋的兩端,怎麼確定會在中間接起來?
2013 年通車的台灣高鐵與更早的雪山隧道,工程上都面臨同一個古老卻致命的問題:一條長隧道從兩端同時開挖,怎麼保證兩支鑽掘機在山體深處「對得上」?雪山隧道全長 12.9 公里,導坑貫通時的橫向誤差僅約 10 公分。這個近乎神奇的精度,靠的不是運氣,而是測量學(Surveying)——一門用角度、距離與座標把真實世界的位置「鎖定」下來的學問。
測量學是所有土木與建築工程的起點。在動土之前,工程師必須先知道「這塊地長什麼樣」:哪裡高、哪裡低、紅線在哪、既有建物與管線的精確位置。施工中,每一根柱子、每一段道路中心線,都要從圖紙上的座標「放樣(setting out)」到真實地面上。完工後,還要持續監測結構是否沉陷或位移。沒有可靠的測量,再精巧的設計都只是紙上談兵。
這篇文章帶你認識測量學的兩大支柱:描述地表起伏的地形測量(topographic surveying),以及把全台灣每一個點都納入統一參考框架的大地座標(geodetic coordinates)系統。
測量的三個基本量:角度、距離與高程
不論工具如何進步,測量的本質始終是確定點與點之間的三個關係:水平角(horizontal angle)、距離(distance)與高程差(elevation difference)。
距離測量從早期的鋼捲尺,演進到今日的電子測距儀(Electronic Distance Measurement, EDM)。EDM 的原理是發射一束調制過的紅外線或雷射光到目標稜鏡,量測光來回的相位差或飛行時間,再換算距離。光速 $c$ 已知,若量得往返時間 $t$,則距離為:
$$D = \frac{c \cdot t}{2}$$
現代全站儀(Total Station) 把測角與測距整合在同一台儀器,照準目標一次就能讀出水平角、垂直角與斜距,並自動換算成平面距離與高程差。
角度測量用經緯儀(theodolite)或全站儀完成。水平角是兩個方向投影到水平面上的夾角;垂直角(或天頂距)則描述視線相對於水平面的傾斜。角度的精度直接影響成果——這點從誤差傳播就看得出來。若用測角 $\theta$ 與距離 $D$ 推算橫向位置 $y = D \sin\theta$,一個微小的角度誤差 $\delta\theta$(以弧度計)會造成橫向誤差:
$$\delta y \approx D \cdot \delta\theta$$
這意味著距離越遠,角度誤差被放大得越嚴重。隧道貫通之所以困難,正是因為導線一路延伸數公里,每一站的微小角誤差會沿線累積。
高程測量最經典的方法是水準測量(leveling)。把水準儀(level)架在兩水準尺之間,分別讀取「後視(backsight, BS)」與「前視(foresight, FS)」讀數,兩點的高程差為:
$$\Delta H = BS - FS$$
逐站累加,就能把一個已知高程點的高度「傳遞」到遠方任意點。
從一個點長出一張網:導線測量
工程現場不可能每個點都直接量到已知基準點,因此測量採用「控制(control)」的概念:先建立少數高精度的控制點構成骨架,再從骨架加密出大量細部點。
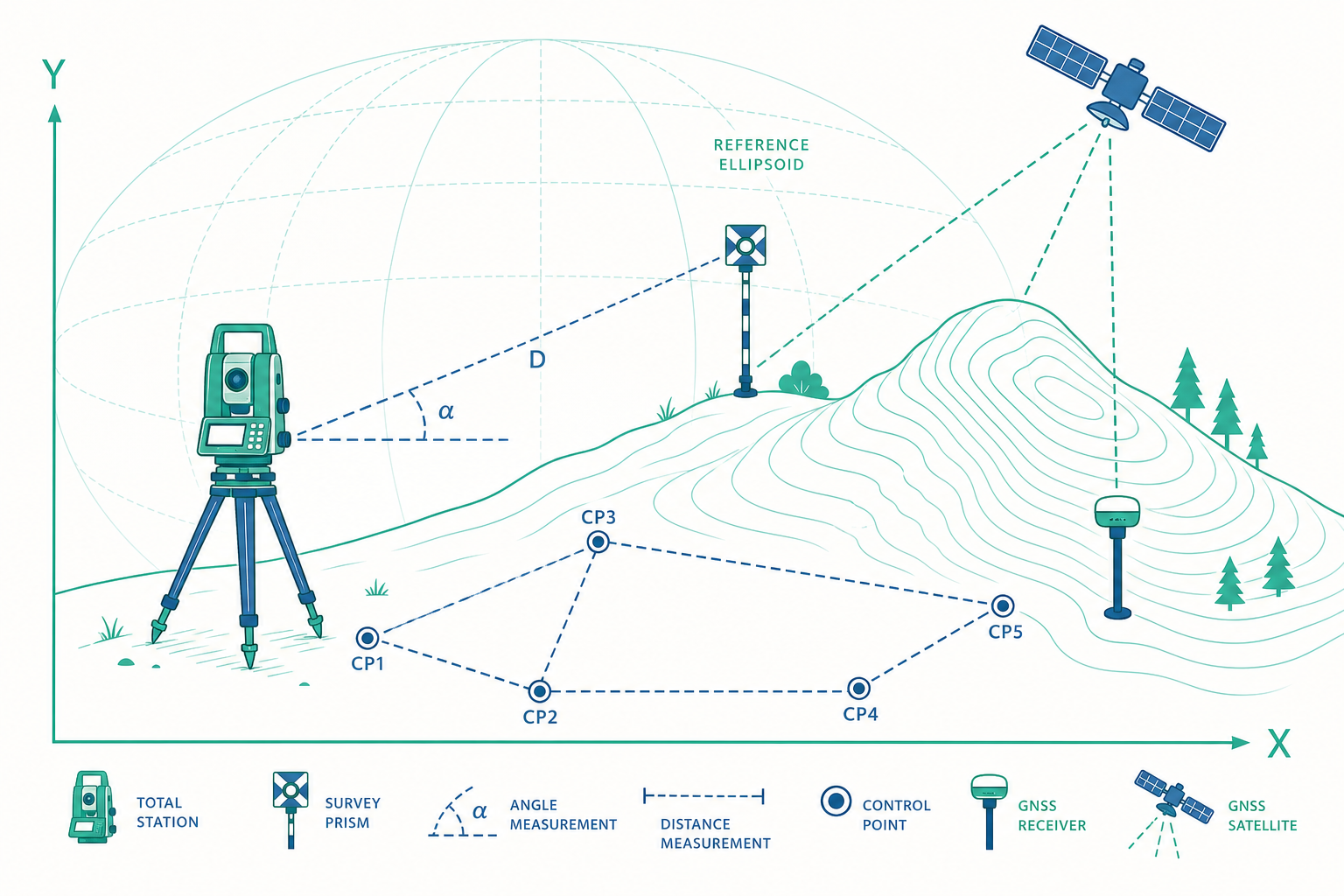
最常用的骨架是導線測量(traverse)。從一已知點出發,依序量測各邊的邊長與轉折角,像走迷宮一樣串成一條折線或閉合多邊形。若已知起點座標 $(X_0, Y_0)$ 與第一邊的方位角(azimuth)$\alpha$,則下一點座標為:
$$X_1 = X_0 + D \sin\alpha, \qquad Y_1 = Y_0 + D \cos\alpha$$
(測量習慣以 $Y$ 軸指向北、方位角從北順時針起算,故 $\sin$ 對應東向 $X$、$\cos$ 對應北向 $Y$。)
導線最迷人之處在於閉合差(closure error) 的概念。當導線繞一圈回到起點,理論上座標應該完全吻合,但因每邊都有微小誤差,實際會差一小段 $(e_X, e_Y)$。閉合差的大小相對於導線總長 $L$,定義出精度比(relative precision):
$$\text{精度比} = \frac{\sqrt{e_X^2 + e_Y^2}}{L} = \frac{1}{N}$$
例如一條總長 1200 公尺的導線,閉合差為 4 公分,精度比就是 $1:30000$。工程測量常要求至少 $1:10000$ 以上。確認精度合格後,再用羅盤規則(compass rule) 或最小二乘平差把閉合差按比例分配回各點,這個過程稱為平差(adjustment)。它體現了測量學的核心精神:誤差無法消滅,但可以被量化、檢核並合理分配。
描繪大地的起伏:地形測量與等高線
工程設計需要知道地表的立體形狀,這就是地形測量的任務。傳統做法是在現場大量採集「地形點(spot height)」——每個點都帶有平面位置 $(X, Y)$ 與高程 $Z$。把這些離散的三維點連起來,就能還原地表。
呈現地形最經典的語言是等高線(contour line):把所有相同高程的點連成一條曲線。等高線越密,代表坡度越陡;越疏則地勢越平緩。相鄰兩條等高線的高程差稱為等高距(contour interval)。等高線永遠閉合、彼此不相交(除非是懸崖峭壁),這些性質讓工程師一眼就能讀出山谷、稜線與坡向。
現代地形測量已大幅自動化。空載光達(airborne LiDAR) 從飛機向地面密集發射雷射脈衝,每秒數十萬點,能快速建立涵蓋整片山區的數值高程模型(Digital Elevation Model, DEM);無人機攝影測量(UAV photogrammetry) 則用重疊航照與電腦視覺演算法重建三維點雲。台灣山高水急、地形破碎,這些技術在山崩監測、河道變遷分析與都市更新測繪上扮演關鍵角色。
有了 DEM,土方工程的填挖方計算(cut and fill) 就能自動化。一個簡單的概念是把設計高程與現況高程相減,逐格累加:
$$V = \sum_{i} (Z_{\text{設計},i} - Z_{\text{現況},i}) \cdot A_i$$
正值代表要回填、負值代表要開挖。道路與整地工程都靠這個算出土方平衡,直接影響造價。
把台灣放進座標系:大地測量與 TWD97
到目前為止我們談的都是「相對」位置。但要讓不同工程、不同單位的測量成果能彼此銜接,必須有一個全國統一的「參考框架(reference frame)」——這正是大地測量(geodesy)的核心。
問題的根源是:地球不是平的,也不是完美的球。它更接近一個赤道略鼓的參考橢球體(reference ellipsoid)。要把橢球上的位置描述出來,需要兩套座標:
- 地理座標(geographic coordinates):經度 $\lambda$、緯度 $\phi$,以角度表示,適合全球定位但不便於平面工程計算。
- 平面座標(plane coordinates):透過地圖投影(map projection) 把曲面攤平成平面 $(E, N)$,方便量距離、算面積。
台灣現行的官方系統是 TWD97(Taiwan Datum 1997),採用 GRS80 參考橢球,並以橫麥卡托投影(Transverse Mercator)的 2 度分帶系統把經緯度轉成平面座標。中央子午線設在東經 121°(澎湖、金門另用 119°),中央子午線尺度比為 0.9999。投影必然帶來變形——離中央子午線越遠,距離變形越大,這是任何平面座標都無法迴避的代價。
更早的 TWD67 系統因橢球與基準不同,與 TWD97 的同一點座標會差約 800~900 公尺,兩者不可混用,換算需經過七參數轉換。這是工程實務上極易出錯的陷阱:拿到一份舊圖時,務必先確認它用的是哪一個基準(datum)。
至於高程,台灣以基隆驗潮站的長期平均海水面為基準,建立 TWVD2001(Taiwan Vertical Datum 2001) 正高系統。值得注意的是,GPS 量到的是相對於橢球面的「橢球高(ellipsoidal height)」,而工程需要的是相對於海平面(大地水準面,geoid)的「正高(orthometric height)」,兩者相差一個大地水準面起伏(geoid undulation)$N$:
$$H_{\text{正高}} = h_{\text{橢球高}} - N$$
忽略這個差異,會讓 GPS 高程出現數十公尺的系統性偏差。
現代的 GNSS(全球衛星導航系統,含 GPS、北斗、Galileo 等) 配合台灣綿密的 e-GNSS 即時動態定位(RTK) 基準站網,已能在野外即時得到公分級的 TWD97 座標,徹底改變了控制測量的作業方式。但衛星定位無法取代地面測量的監督角色——在隧道內、高樓林立的都會峽谷、或衛星訊號被遮蔽處,全站儀與水準儀仍是不可替代的主力。
看一個例子
某工地以全站儀從已知控制點 A $(X_A = 250{,}000.000,\ Y_A = 2{,}760{,}000.000)$(單位:公尺,TWD97)開始放樣。已知 A 到下一點 B 的方位角 $\alpha = 65°00'00''$、水平距離 $D = 180.000$ 公尺。試求 B 點的 TWD97 平面座標。
步驟一:計算座標增量
$$\Delta X = D \sin\alpha = 180.000 \times \sin 65° = 180.000 \times 0.90631 = 163.136 \text{ m}$$
$$\Delta Y = D \cos\alpha = 180.000 \times \cos 65° = 180.000 \times 0.42262 = 76.072 \text{ m}$$
步驟二:累加得 B 點座標
$$X_B = X_A + \Delta X = 250{,}000.000 + 163.136 = 250{,}163.136 \text{ m}$$
$$Y_B = Y_A + \Delta Y = 2{,}760{,}000.000 + 76.072 = 2{,}760{,}076.072 \text{ m}$$
步驟三:誤差感受
若全站儀的測角精度為 $\pm 5''$(約 $2.42 \times 10^{-5}$ 弧度),由 $\delta y \approx D \cdot \delta\theta$ 估算,B 點橫向誤差約為:
$$\delta y \approx 180.000 \times 2.42 \times 10^{-5} \approx 0.0044 \text{ m} = 4.4 \text{ mm}$$
在 180 公尺距離下,5 秒的測角精度只造成約 4.4 公釐的橫向誤差,這正是高精度全站儀能勝任結構放樣的原因。但若把同樣的角誤差延伸到 2 公里的隧道導線,誤差就會放大到約 5 公分——這解釋了為何長隧道測量必須反覆檢核、嚴格平差。
重點回顧
- 測量的三個基本量是水平角、距離與高程差;現代全站儀整合測角與測距(EDM),GNSS/RTK 則能即時提供公分級座標。
- 工程測量採「控制先行、細部加密」策略,導線測量用閉合差與精度比檢核品質,再以平差合理分配誤差。
- 地形測量以地形點與等高線描述地表起伏;LiDAR 與無人機攝影測量自動建立 DEM,支援填挖方計算。
- TWD97 是台灣現行大地基準,以 GRS80 橢球與 2 度分帶橫麥卡托投影定義平面座標,與舊的 TWD67 相差約 800~900 公尺,絕不可混用。
- GPS 量得的是橢球高,工程需要的正高須減去大地水準面起伏 $N$,否則高程會有系統性偏差。
深入探討(研究所視角)
測量學的進階核心是測量平差(adjustment of observations) 與最小二乘法(least squares)。當觀測量(角度、距離)的數目多於決定未知數所需的最少數量時,系統「過約束(over-determined)」,各觀測之間必然矛盾。最小二乘平差透過建立觀測方程式 $\mathbf{v} = \mathbf{A}\mathbf{x} - \mathbf{l}$,在「殘差平方和最小」的準則下求解最佳估計值 $\hat{\mathbf{x}} = (\mathbf{A}^T \mathbf{P} \mathbf{A})^{-1} \mathbf{A}^T \mathbf{P} \mathbf{l}$,其中 $\mathbf{P}$ 是依各觀測精度給定的權矩陣(weight matrix)。這套理論不僅給出座標,更同時輸出每個點的誤差橢圓(error ellipse),量化定位的可靠度——這正是測量學作為一門「不確定性管理」科學的精髓。
在台灣的工程脈絡下,測量更深入結構安全監測領域。高樓、橋梁、大壩與邊坡都需長期的變形監測(deformation monitoring):以高精度全站儀自動觀測(automated total station)、GNSS 連續站、地面光達或衛星雷達干涉(InSAR)週期性量測位移,建立時間序列模型。地震頻繁的台灣,板塊運動本身就讓地面持續位移——這也是為何 TWD97 後續推出歷元(epoch) 修正(如 TWD97[2010]),把地殼變動納入座標框架。現代的 動態參考框架(kinematic reference frame) 與 PSInSAR 地表沉陷監測,正把測量學從「量靜止的點」推向「追蹤會動的地球」,這也是大地測量與地球物理交會的最前沿研究方向之一。